He aha a pehea e hana ai ka hoʻokuʻu adaptive
Nā mea
ʻO kahi ala e hoʻomaikaʻi ai i ka hoʻokuʻu ʻana o ke kaʻa, ʻo ia ka hoʻololi ʻana i ke ʻano o ke ala, ka wikiwiki, a i ʻole ke ʻano hoʻokele. Hiki ke hoʻokō i kēia me ka hoʻohana ʻana i nā mea uila a me nā mea hana electromagnetic kiʻekiʻe, pneumatic a hydraulic. ʻO ke kaʻa like, me ka hoʻololi wikiwiki i nā hiʻohiʻona hoʻokuʻu, hiki ke loaʻa i nā pono pilikino o kahi kaʻa haʻuki alanui, SUV a i ʻole kaʻa māmā. A i ʻole e hoʻomaikaʻi nui i ka hōʻoluʻolu o ka poʻe kaʻa.
Nā kumu o ka hoʻonohonoho hoʻololi
No ka loaʻa ʻana o ka hiki ke hoʻololi i nā mana o waho a i ʻole nā kauoha hoʻokele, pono e loaʻa i ka hoʻokuʻu ʻia kahi ʻano hana. Hoʻopaʻa mau nā mīkini passive i kekahi mau hopena. Hiki i nā mea ikaika ke hoʻololi i kā lākou mau hiʻohiʻona. No ka hana ʻana i kēia, loaʻa iā lākou kahi ʻāpana uila mana, ʻo ia kahi kamepiula e hōʻiliʻili i ka ʻike mai nā sensor a me nā ʻōnaehana kaʻa ʻē aʻe, loaʻa nā ʻōlelo aʻoaʻo mai ka mea hoʻokele a, ma hope o ka hana ʻana, hoʻonohonoho i ke ʻano i nā mea hana.

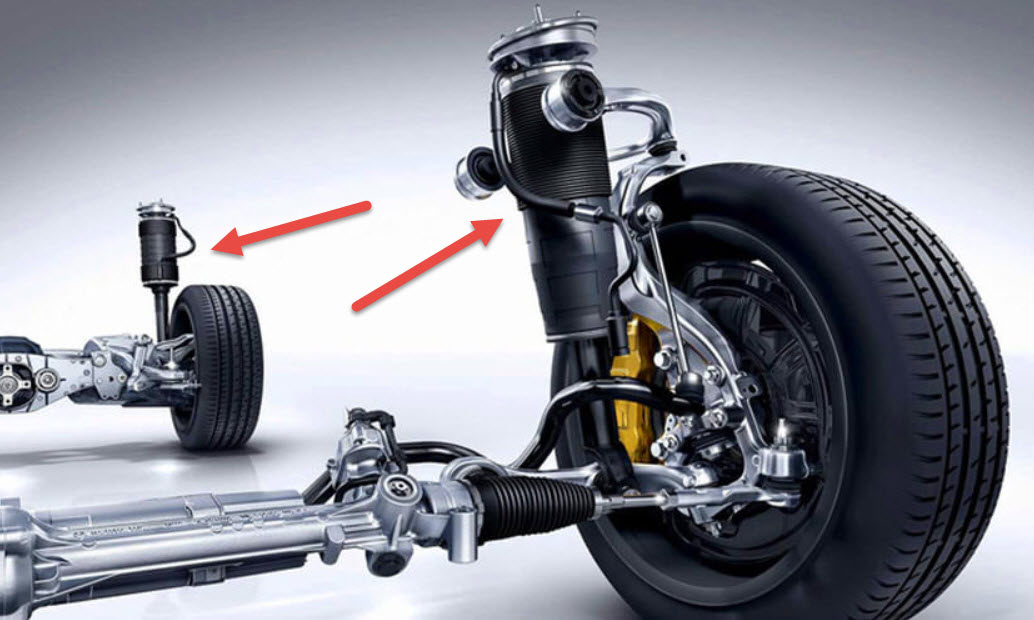
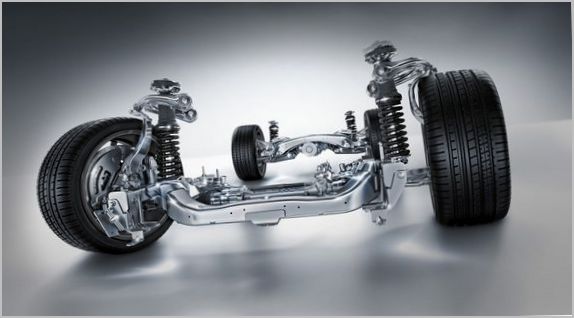
E like me kāu e ʻike ai, aia ka hoʻokuʻu ʻana i nā mea elastic, nā mea hoʻoheheʻe a me kahi vane alakaʻi. ʻO ka manaʻo, hiki ke hoʻomalu i kēia mau mea āpau, akā i ka hoʻomaʻamaʻa ʻana ua lawa ia e hoʻololi i nā waiwai o nā dampers (nā mea hoʻoheheʻe haʻalulu). He mea maʻalahi kēia e hana me ka hana kūpono. ʻOiai inā ʻaʻole koi ʻia ka wikiwiki o ka hopena, no ka laʻana, ke ʻano kaʻa kaʻa, ka hoʻololi ʻana i ka hoʻomaʻemaʻe ʻāina a i ʻole static stiffness e pili ana i nā hoʻoponopono, a laila hiki ke hoʻololi i ka hoʻonohonoho hoʻokuʻu ʻana no kāna mau mea āpau.
No ka hoʻololi ʻana i ka hana, pono e noʻonoʻo i nā ʻāpana komo:
- ʻikepili e pili ana i nā hewa o ke alanui, i kēia manawa a me ka wā e hiki mai ana;
- holo wikiwiki;
- kuhikuhi, ʻo ia hoʻi, ke kihi o ka hoʻololi ʻana o nā huila hoʻokele a me ka wikiwiki ʻana o ke kaʻa holoʻokoʻa;
- kūlana a me ka māmā holo o ka hoʻokele huila;
- ʻO nā koi o ka mea hoʻokele e like me ka nānā ʻana i kāna ʻano hoʻokele, a me nā mea i komo i ke ʻano manual;
- ke kūlana o ke kino e pili ana i ke alanui, nā palena o kona hoʻololi i ka manawa;
- nā hōʻailona sensor ʻano radar e nānā i ke kūlana o ka uhi i mua o ke kaʻa;
- ka lōʻihi a me ka transverse accelerations o ke kaʻa, engine a me braking system operating modes.
Aia i loko o ka papahana block control nā algorithms no ka pane ʻana i nā hōʻailona e komo mai ana a no ka hōʻiliʻili ʻana i ka ʻike. Hoʻouna maʻamau ʻia nā kauoha i nā huila e hoʻopaʻa ʻia i ka uila o nā huila a pau, i kēlā me kēia huila, a me nā hui hoʻoikaika o nā kaola anti-roll. A i ʻole i nā mea hana e hoʻololi iā lākou i ka wā e hana ai ma ke ʻano he ʻāpana o ka hoʻokuʻu ʻia ʻana o ka hydraulically controlled, a me nā huahana ʻenehana kiʻekiʻe e hana wale ana i ka pilina electromagnetic. I ka hihia hope loa, ʻoi aku ka kiʻekiʻe o ka wikiwiki o ka pane ʻana i hiki ke hoʻokō ʻia ke ʻano kūpono mai ka hana o ka hoʻokuʻu ʻana.
Hui Pūnaehana
Loaʻa ka paʻakikī i nā mea hana e hōʻoia ai i ka hoʻoponopono ʻana i nā waiwai damping a me ka dynamic stiffness, a me ka hōʻemi ʻana i ka ʻōwili kino:
- ka mea hoʻomalu hoʻomaha me ka microprocessor, ka hoʻomanaʻo a me nā kaapuni I/O;
- nā mīkini hana no ka pale ʻana i ka ʻōwili (nā ʻāpana anti-roll i kāohi ʻia);
- paʻakikī o nā meaʻike;
- nā mea hoʻopaneʻe e hiki ai ke hoʻomalu uila i ka ʻoʻoleʻa.
ʻO ka mana o ka dashboard, ʻo ka pinepine kēia he hōʻike pānaʻi ma luna o ka papa, hiki i ka mea hoʻokele ke hoʻonohonoho i kekahi o nā ʻano hana e like me kāna makemake. ʻAe ʻia ka mana o ka hōʻoluʻolu, ka haʻuki a i ʻole ke ala ʻē aʻe, a me ka hana maʻamau o nā hana me ka hoʻomanaʻo mode. Hiki ke hoʻihoʻi koke ʻia ka hoʻololi i hōʻiliʻili ʻia i nā hoʻonohonoho kumu.

ʻO nā koi no nā stabilizer transverse he paio mau. Ma kekahi ʻaoʻao, ʻo kā lākou kumu e hōʻoia i ka liʻiliʻi o ka ʻōwili kino. Akā ma kēia ala e loaʻa ai i ka hoʻokuʻu ʻia ke ʻano o ka hilinaʻi, ʻo ia ka mea e hōʻemi ʻia ka hōʻoluʻolu. I ka wā e holo ai ma nā ala ʻino, ʻoi aku ka maikaʻi o ka hiʻohiʻona ʻoi aku ke kūʻokoʻa o nā huila pākahi e hoʻokō ai i ka ʻōlelo kiʻekiʻe o nā axles. Ma kēia ala wale nō, e hoʻohana piha ʻia nā mālama huakaʻi hoʻomaha a pau e hōʻoia i ka hoʻopili mau ʻana o nā kaila me ka uhi. ʻO kahi stabilizer me ka ʻoʻoleʻa mau, ʻo ia ka mea maʻamau i kahi pahu maʻalahi o ke kila puna, e hana ana ma ke kumu o ka torsion bar, ʻaʻole hiki ke lawelawe like i nā kūlana āpau.
I nā hoʻokuʻu ikaika, ua māhele ʻia ka stabilizer, me ka hiki ke hoʻoponopono uila. Hiki ke ho'ohana 'ia nā loina like 'ole e ho'omalu i ka 'o'ole'a i ho'emi 'ia. Hoʻohana kekahi mau mea hana i kahi preload no ka wili ʻana e kahi kaʻa uila me kahi pahu pahu, hoʻohana kekahi i ke ʻano hydraulic, hoʻokomo i nā cylinders hydraulic ma ka stabilizer a i ʻole kona hoʻopili ʻana i ke kino. Hiki nō hoʻi ke hoʻohālike piha i ka pahu stabilizer me nā pahu hydraulic hoʻokahi e hana like ana me nā mea elastic.
Nā mea hoʻoweliweli haʻalulu hoʻoneʻe
Hiki i ka mea hoʻoheheʻe haʻalulu maʻamau ke hoʻololi i kona ʻoʻoleʻa ikaika ma muli o ka wikiwiki a me ka wikiwiki o ka neʻe ʻana o ke koʻokoʻo. Loaʻa ʻia kēia ma kahi ʻōnaehana o nā kīwī throttling kahi e kahe ai ka wai humuhumu.
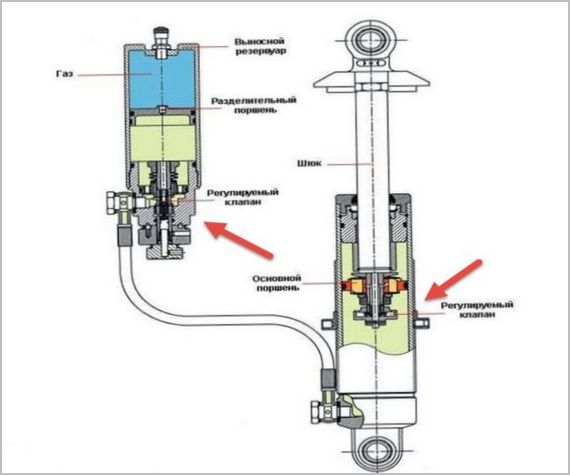
No ka hoʻomalu ʻana i nā throttles bypass, hiki i nā ala ʻelua - ke hoʻokomo ʻana i nā valve electromagnetic spool-type a i ʻole ka hoʻololi ʻana i nā waiwai o ka wai i loko o kahi māla magnetic. Hoʻohana nā mea hana i nā ʻano ʻelua, ʻoi aku ka liʻiliʻi o ka lua, no ka mea e koi ʻia kahi wai kūikawā e hoʻololi i kona viscosity i kahi māla magnetic.
ʻO nā ʻokoʻa hana nui o nā hoʻokuʻu adaptive
ʻO ka hoʻokuʻu ʻana me ka waiwai o ka adaptation e hāʻawi i ka hiki ke hoʻokele programmatically i nā ʻano mea kūʻai aku o kahi kaʻa ma kekahi alanui:
- mālama mau ke kino i kahi kūlana i hāʻawi ʻia e pili ana i ke alanui, ʻo nā deviations mai kahi e hoʻoholo wale ʻia e ka wikiwiki o ka ʻōnaehana adaptation;
- loaʻa i nā huila ka mea hiki ke hoʻopili mau ʻia me ka uhi;
- ʻO ke kiʻekiʻe o ka wikiwiki i loko o ka pahu mai nā puʻupuʻu he haʻahaʻa loa ia ma mua o ka hoʻokuʻu maʻamau, kahi e hoʻonui ai i ka hōʻoluʻolu o ka huakaʻi;
- ʻoi aku ka maikaʻi o ke kaʻa a ʻoi aku ka paʻa i nā wikiwiki kiʻekiʻe;
- hiki i nā ʻōnaehana ʻoi loa ke manaʻo i nā puʻupuʻu ma ka nānā ʻana i ke ala ma mua o nā huila a me ka hoʻoponopono ʻana i nā dampers ma mua.
ʻO ka hemahema, e like me nā ʻōnaehana paʻakikī, hoʻokahi - paʻakikī kiʻekiʻe a me nā hōʻailona pili pono a me nā kumukūʻai. No laila, hoʻohana ʻia nā hoʻokuʻu adaptive i ka ʻāpana premium a i ʻole nā mea hana koho.
ʻO nā algorithms o ka hana a me kahi hoʻonohonoho o nā mea hana e lilo mau ana i mea paʻakikī a hoʻomaikaʻi. ʻO ka pahuhopu nui o ka hoʻomohala ʻana i ke kahua o ka hoʻokuʻu ʻana i ka adaptive hoʻoikaika e hoʻokō i ka hoʻomaha ʻoi loa o ke kino o ke kaʻa, ʻaʻohe mea e pili ana i nā huila a me kā lākou hui unsprung nui. I kēia hihia, pono e mālama mau nā huila ʻehā i ka pilina me ke alanui, e mālama i ke kaʻa ma kahi alahele i hāʻawi ʻia.